Night Offshore Take-Off Loss of Control Incident (Bristow Norway Sikorsky S-92A LN-ONT)
On 24 February 2020 Sikorsky S-92A LN-ONT of Bristow Norway suffered a 40 second loss of control during a night time offshore take off from the Maersk Invincible (now Nobel Invincible) jack-up drilling rig in AkerBP Valhall field the North Sea. Control was regained and the flight continued safely to its destination.
The Norwegian Safety Investigation Authority (NSIA) issued their safety investigation report on this Serious Incident on 15 February 2024.
The Incident Flight
The helicopter had been turned round on the rig’s helideck, ready for a return flight to Stavanger with 11 persons on board.
The aircraft commander had 6,750 flying hours of experience, 2,191 on type. He had performed 8 night deck landings in the last 90 days.
The co-pilot had 5,800 flying hours of experience, 605 on type. He had completed 11 night deck landings in the last 90 days and 211 night hours, 84 on type in the last 12 months.
The operator’s pilots regularly received simulator training. This included take off and landing on offshore helidecks in various simulated weather conditions, day and night.
Based on the wind direction the Pilot Flying (PF) would be the co-pilot and the commander would be the Pilot Monitoring (PM).
The crew told the NSIA that, with the rain beating against the front windows, it was impossible to see any form of horizon in the dark. The entirety of the oil rig with its lights and lit structures, which could have provided visual references, was behind the helicopter.
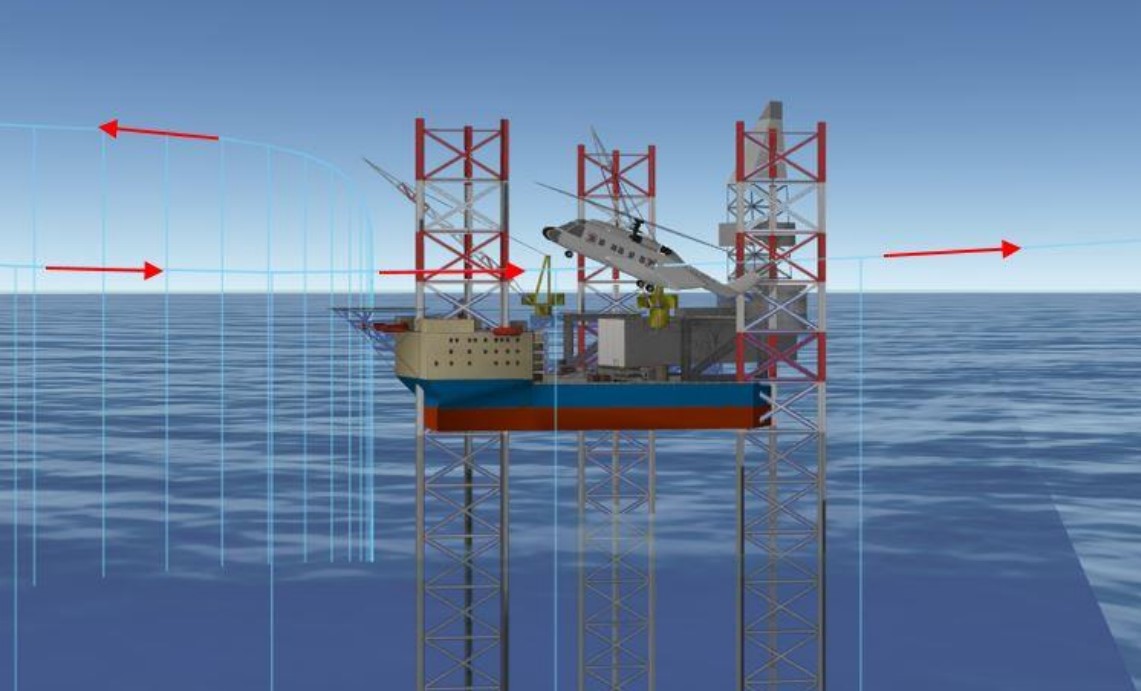
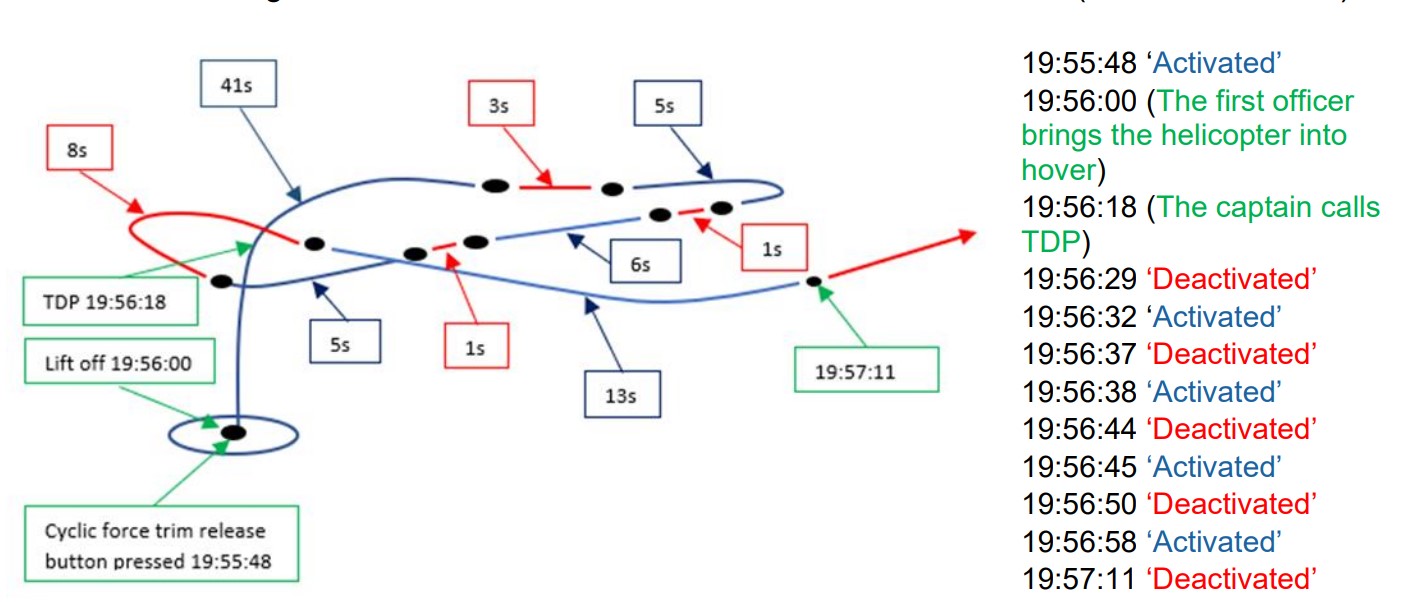
At 19:56 hrs [UTC], the first officer [the PF] brought the helicopter into a 5-ft hover above the helideck and prepared to take off into the wind.
When the commander had completed the hover check, the first officer moved the collective to 80% torque to start a vertical climb to the take-off decision point (TDP).
When the commander [the PM] called ‘TDP’ at 19:56:18 hrs, the first officer moved the cyclic gradually forward to a 5° nose down pitch to initiate horizontal acceleration. A 5° nose-down pitch is in accordance with the helicopter manufacturer’s recommendations and the helicopter operator’s procedures for take-off from a helideck in night-time conditions or poor weather with reduced horizontal visibility. The torque was 74% on both engines.
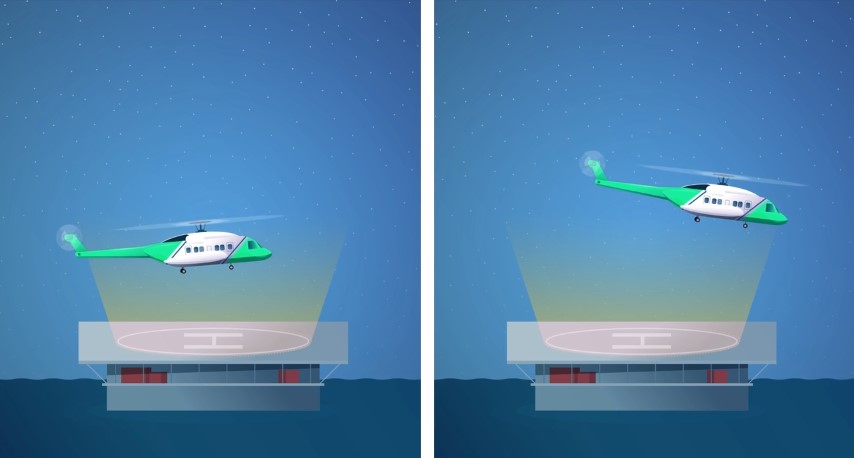
As the helicopter transitioned forward they entered darkness, what is known as a ‘black hole’. Such conditions typically occur over water or over dark, featureless terrain.
Initially the helicopter exhibited “a low” sink rate and the commander “focused his attention on the vertical speed indicator”.
When it showed a sink rate of 100 ft/min, he called out ‘We are descending’ two times. Just after that, the voice alert ‘Altitude, altitude – altitude, altitude’ indicated that the helicopter was about to drop below the minimum altitude selected on the radar altimeter [set at deck height, 260 ft]… The commander has explained that, after the voice alert, he got the feeling that the instrument readings did not match with what he expected, and he felt that he became disoriented.
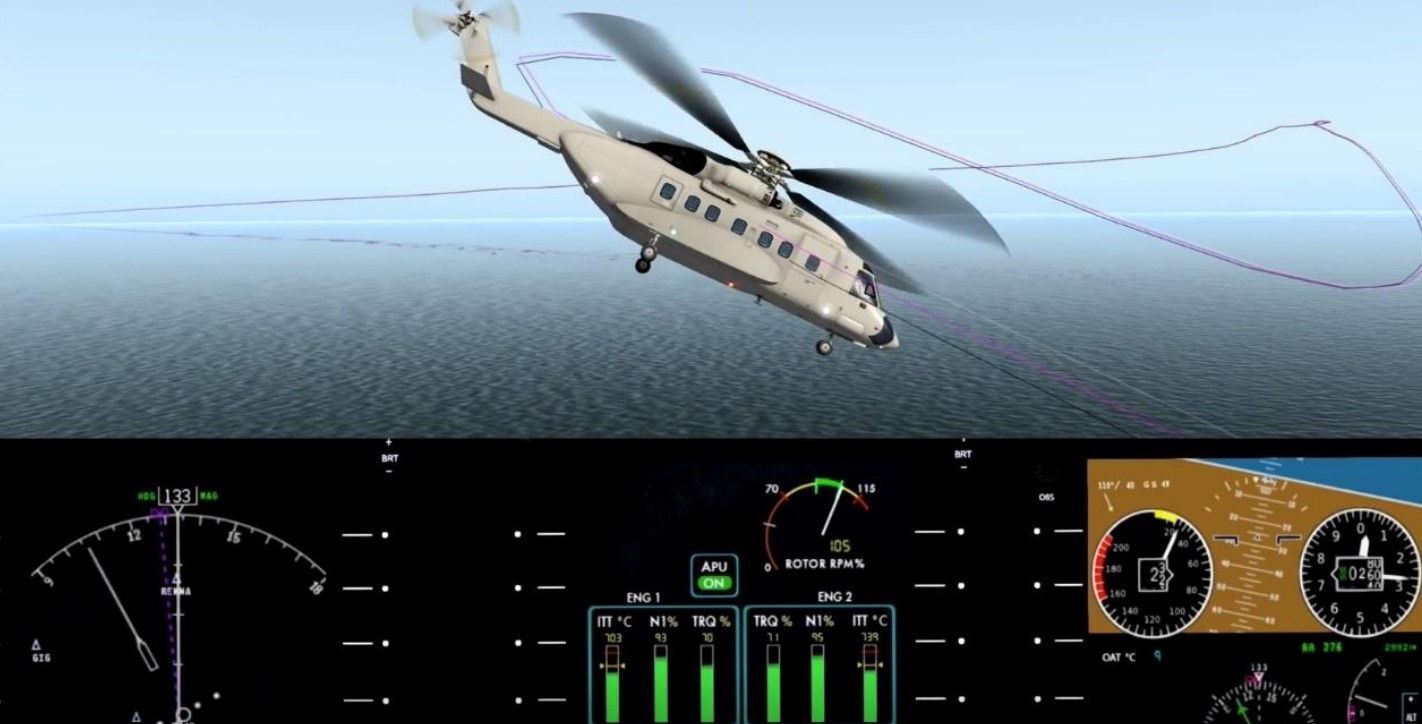
A few seconds afterwards, when the helicopter had accelerated to approximately 35 kts at an altitude of 306 ft, the [pitch] angle increased by 6.4° per second to more than 25° nose up pitch up.

At the same time, the indicated horizontal airspeed dropped to zero.
During this phase, the torque of both engines dropped to 66% before it was increased to 88%.
The co-pilot likened the experience to being in a simulator “where you don’t experience the sensation of acceleration”.
The helicopter then developed a nose-up pitch in excess of 20° for approximately 15 seconds while moving sideways to the left, after which it started to accelerate rearwards and downwards.
The lack of visual clues would have reduced the ability to interpret the helicopters direction of movement.
During that phase, the helicopter nose turned to the right, from 103° to 155°.
This was likely “a result of inadequate correction with the left pedal as the collective was increased”.
With 89% engine torque, the helicopter continued to lose altitude at a vertical speed of more than 375 ft/min for 10 seconds.
The FDR showed that the helicopter travelled backwards with a ground speed exceeding 30 kts for
12 seconds, and that the maximum recorded rearward speed was 49 kts.
In total, the rearward flight covered a distance of approximately 210 m north of the platform. The lowest radar altitude during this phase was 210 ft above sea level.
Replaying the helicopter’s voice recorder (CVR), it became clear that, during the phase when the helicopter was moving rearwards nose-up, the first officer became confused about who was in control. The first officer first expressed uncertainty as to whether the commander was operating the controls at TDP + 23 seconds. Initially, the commander replied in the negative. The commander did confirm that he was operating the controls 11 seconds later, which was TDP + 34 seconds.
During this period of uncertainty, at TDP + 31 seconds, the commander became aware of the the Maersk Invincible to his right (c 200 m away). Due to the lack of other visual clues he would have initially perceived this as the drilling rig moving forwards on his right.
Simultaneously the helicopter was drifting sideways towards the left, away from the [drilling rig], while the nose was turning left from approximately 160° to 90°.
At that time, the commander ” was primarily focusing his attention on the artificial horizon indicator” and realised the co-pilot “was struggling to gain control of the situation”.
Once the commander took over the controls at TDP + 34 seconds, he pressed the force trim release button “to stabilise the helicopter”. The co-pilot “was still at the controls, however, as he wanted to make sure that the commander had actually assumed control of the helicopter”.
Before the subsequent acceleration, while the commander sought to regain control, the helicopter reached a maximum nose-down pitch of 28.12°.
The engine torque briefly dropped to 64% before it was corrected to 88% as the horizontal speed gradually increased to 90 kts.
At 19:57:07 hrs, TDP + 49 seconds, the terrain warning system (EGPWS) was activated. This was after the crew was in the process of regaining positive control and the helicopter accelerated and lost altitude.
The system then transmitted the warnings ‘Don’t sink, don’t sink’ [Mode 3] and ‘Warning terrain, warning terrain, warning terrain’ [Mode 2B] to the pilots’ headset. These warnings were also displayed visually on the instrument panel.
The helicopter’s lowest registered radar altitude was 175 ft, and the sink rate peaked at 870 ft/min.
A stable speed of 80 kts was subsequently achieved and the pilots established a stable eastward climb-out to a cruising altitude of 1,000 ft…
The helicopter landed safely at Stavanger.
[B]oth pilots were granted leave from active service and offered psychological consultation in accordance with the helicopter operator’s procedures for following up serious aviation incidents. After a short period of leave, the pilots resumed their flight duties.
NSIA Investigation, Analysis and Safety Recommendations
NSIA comment that:
The human sensory system consists of the visual system (sight), the vestibular system (organ of balance) and the somatosensory system (skin, joint and muscle senses). These systems are adapted to life on the Earth’s surface. Under the special force and movement conditions that prevail in an airplane or helicopter, the senses can under some conditions provide information to the pilot that gives an incorrect picture of the situation.
This is called ‘spatial disorientation’ and is caused by various sensory illusions. In particular the…
…somatogravic illusion…usually occurs only when the aviator has limited visual references (Gradwell & Rainford, 2016). When the aviator has good visual references, the visual system will usually correct signals from the vestibular system so that the illusion does not occur.
A short SKYclip on somatogravic illusions, to which Aerossurance helped develop, is available here:
NSIA emphasise that:
Spatial disorientation can happen to all pilots and occurs more frequently when flying in bad weather or at night, due to the fact that external visual reference will then be limited.
In this case the take off was in…
…very challenging conditions where the crew had no external visual references [and] control was lost before reaching the minimum speed [Vmin] for engaging the autopilot [50 knots].
NSIA comment that “the combination of headwinds exceeding 30 kts and heavy rain may have contributed to an illusion of forward speed during take-off”.
NSIA contemplated recommending the adoption of an upgrade of the autopilot called ‘Rig Approach‘, first certified in 2013, which allows the autopilot to be engaged below 50 kts and enables GPS approaches. They decided not to as a consultation with stakeholders determined that “the view on the safety benefits of a comprehensive and expensive upgrade is divided”.
NSIA postulate that the co-pilot may have been confused by the lack of displayed airspeed data but increasing (actually rearward) groundspeed.
CVFDR information has shown that [Crew Resource Management] CRM and communication between the pilots was not working optimally during this period, which was also confirmed by the pilots after the incident.
The NSIA believes that the disorientation occurred abruptly and unexpectedly, which in turn led to CRM and crew cooperation with the transfer of flight controls during the acute stress that arose not being as expected.
The moment of surprise, and stress in itself can be a great threat to the communication skills, the cooperation between the pilots and how they solve their tasks. The same applies to the stress the crew experienced during the challenge of interpreting the instruments to understand the situation.
The threshold for taking over the flight controls when suffering from disorientation and being incapable of interpreting the information presented on the display in the cockpit is naturally very high. The fact that the commander became aware of and established visual contact with the oil rig on his right may have been essential for improving his situational awareness.
NSIA note that the concept of threat and error management (TEM) featured in the operator’s procedures, checklists and training. The operator however left it to the crew to determine if the pre-departure briefing was a ‘standard’ brief or a more comprehensive TEM one, that in this case could have considered the threat of spatial disorientation.
The NSIA believes that [with a more comprehensive briefing] the crew would probably have been better prepared, not so surprised and not as stressed during the departure.
In the NSIA’s opinion, although TEM is taken into consideration in the helicopter operator’s
operational documents, it should to a greater extent be incorporated as a natural and visible part of
day-to-day operations.
NSIA recommends the Norwegian Civil Aviation Authority (CAA-N)…
…emphasize following up the operators’ procedures and routines related to TEM, TEM training
and how TEM is managed in daily operations.
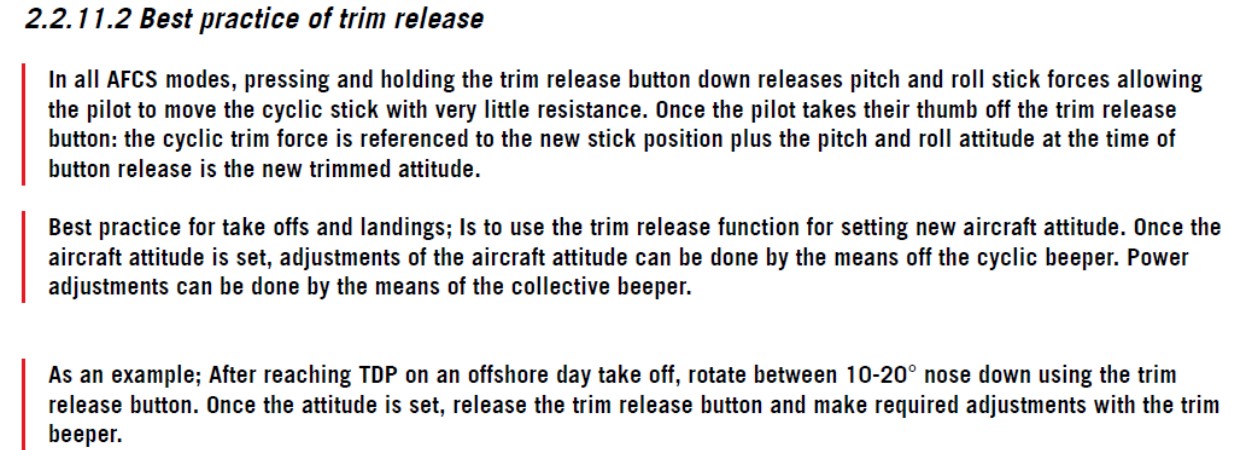
The operator’s simulator training programme does includes upset prevention and recovery training (UPRT), with special emphasis on offshore take-offs. Pilots are instructed in the following procedure for recovering from unusual helicopter attitude:
- Establish a horizontal attitude (wings-level, roll attitude).
- Point the helicopter’s nose towards the horizon or just above (2–3° pitch-up).
- Adjust the collective to make corrections for loss of altitude or to climb to a safe altitude correct airspeed according to the situation.
The operator had…
…a number of standard calls for deviations in altitude, speed and sink rate. However, it does not include a standard callout for deviation in pitch attitude.
NSIA recommends that pitch call outs are introduced when deviating beyond an established threshold.
The operator has adopted the ‘two-challenge rule’ where if the PF fails to respond to two consecutive verbal challenges from the PM regarding deviations from defined flight parameters, the PM assumes control, stating “I have control”. In this case [our emphasis added]…
The two challenge rule and correct handover of the flight controls had no effect because both the first officer and the captain appear to have been significantly disoriented and stressed.
NSIA note that:
The autopilot in the S-92A is designed with 50 kts as the minimum indicated airspeed for engaging the autopilot’s airspeed mode, altitude mode, heading, altitude preselect and vertical speed.
After take-off from Maersk Invincible, LN-ONT accelerated to an indicated airspeed of 28 kts before the high nose-up pitch caused the speed to drop to zero. The helicopter drifted leftwards and started to accelerate rearwards. The helicopter did not reach the minimum speed for engaging the autopilot modes (V-min) until the commander took over the flight controls, initiated a descend and accelerated the helicopter through and beyond 50 kt.
NSIA also explain that:
When the pilot presses the cyclic force trim release button, and then moves cyclic, cyclic is given a new reference point for the helicopter’s position around the longitudinal axis and transverse axis (roll and pitch) when the button is released again.
Data from the flight data recorder show that the cyclic force trim release button was depressed (activated) and released (deactivated) five times during the take-off.
The crew has informed the NSIA that the cyclic force trim release button was last activated when
the commander took over the flight controls. The button was depressed for 13 seconds and
deactivated at 19:57:11; TDP + 53 seconds, after a steady climb and airspeed had been
established.
The FDR data does not indicate which side in the cockpit the cyclic force trim release button was operated from.
There was no standard procedure for use of the cyclic force trim release button at the time of the incident.
It was up to the individual pilot to choose the technique [they] considered best. The NSIA has been informed that the technique preferred by most pilots in connection with take-off from a helideck was to depress the button before bringing the helicopter into a hover, and to not release it until stable climb parameters had been established.
An alternative technique used was to release the button when the correct pitch-up attitude had been established for the climb, and then make finer adjustments using the AFCS trim beeper switch on the cyclic.
The NSIA believes that using the cyclic force trim release button…may have caused some overcontrolling and thus made the situation worse. The way the cyclic force trim release button was used may also have extended the period during which the helicopter was out of control.
After this incident the following practice was adopted:
The helicopter’s aerodynamic characteristics, whereby the airflow raised the forward part of the rotor disc during acceleration, may also have contributed to the helicopter’s nose-up attitude. In combination with disorientation, it may have been challenging to apply forward cyclic, or trim the helicopter forward at the correct rate by using the AFCS trim beeper switch to compensate for the aerodynamically induced pitch-up.
NSIA Conclusions
These included:
The incident occurred in challenging weather conditions…before the minimum speed for engaging the autopilot (V-min) was reached.
And:
…both pilots were for a period subject to disorientation simultaneously.
In the case of the co-pilot:
This led to him overcorrecting the flight controls which in turn caused the helicopter to deviate from a normal departure flight profile.
Whether it was done intentionally or not, failure to release the cyclic trim switch to set aircraft reference pitch attitude, the correct pitch-up attitude to climb and trim out the resistance in the cyclic probably contributed to aggravate the situation.
They say…
The crew were in a stressful situation and the commander himself has described that the CRM did not work as expected during this period.
When the commander made visual contact with the oil installation on the right side of the helicopter, he regained his situational awareness and took over the flight controls.
Safety Resources
The European Safety Promotion Network Rotorcraft (ESPN-R) has a helicopter safety discussion group on LinkedIn. EHEST (now ESPN-R) has published: Leaflet HE 8 The Principles of Threat and Error Management for Helicopter Pilots,Instructors and Training Organisations.
HeliOffshore has published a Flightpath Management (FPM) Recommended Practice (RP) for Offshore Helicopter Operations. The key elements of the FPM RP are embedded in the risk based controls within Flight Safety Foundation (FSF) Basic Aviation Risk Standard for Offshore Helicopter Operations (BARSOHO).
You may also find these Aerossurance articles of interest:
- South Korean Night Black Hole Spatial Disorientation Helicopter Fatal Accident
- Taiwan NASC UH-60M Night Medevac Helicopter Take Off Accident
- Technology Friend or Foe – Automation in Offshore Helicopter Operations
- The ‘Automation Problem’ – A Discussion
- HEMS S-76C Night Approach LOC-I Incident a near accident in Canada
- Loss of Control, Twice, by Offshore Helicopter off Nova Scotia
- AW139 A6-AWN Ditching off UAE, 29 April 2017
- NH90 Caribbean Loss of Control – Inflight, Water Impact and Survivability Issues
- Korean Kamov Ka-32T Fire-Fighting Water Impact and Underwater Egress Fatal Accident
- Offshore Night Near Miss: Marine Pilot Transfer Unintended Descent
- Automation Issues During Night SAR Training – Near CFIT
- NTSB Report on Bizarre 2012 US S-76B Ditching
- Night Offshore Training AS365N3 Accident in India
- NTSB Investigation into AW139 Bahamas Night Take Off Accident
- Night Offshore Windfarm HEMS Winch Training CFIT
- BK117 Offshore Medevac CFIT & Survivability Issues
- In-Flight Flying Control Failure: Indonesian Sikorsky S-76C+ PK-FUP
- Helideck Heave Ho!
- Wrong Deck Landings
- Offshore Helicopter Emergency Response
- North Sea Helicopter Struck Sea After Loss of Control on Approach During Night Shuttling (S-76A G-BHYB 1983)
- UPDATE 18 February 2024: Night Offshore Helicopter Approach Water Impact
- UPDATE 18 December 2024: Loss of Sikorsky S-76C+ 5N-BQG of Eastwind Off Nigeria 24 October 2024
- UPDATE 20 December 2024: 29 Seconds to Impact: A Fatal Night Offshore Approach in the Irish Sea
- UPDATE 8 February 2025: S-76D Loss of Control on Approach to an Indian Drilling Rig
- UPDATE 25 May 2025: CHC Sikorsky S-92A Seat Slide Surprise(s)
Another short SKYclip on somatogravic illusions is available here: